Member-only story
Mastering ROS2: Harnessing the Power of ROS2 Parameters for Real-Time Configuration
Introduction
Have you ever wondered how to manage configuration variables that need to be shared across multiple nodes in your ROS2-based robotic application? Enter ROS2 Parameters, a powerful mechanism that lets you centralize your robot’s configuration. From tuning PID controllers to specifying robot names, ROS2 Parameters offer a straightforward way to read, write, and dynamically adjust key variables at runtime.
If you’re new to ROS2 and want a reliable way to set up a development environment, check out my comprehensive guide on installing and configuring ROS2 with GUI support in a Docker container. To master the basics of ROS2 nodes, topics, services, and actions, you can refer to my other blogs: Beginner’s Guide to ROS2 and Building Robust Communication with Custom Messages, Services, and Actions.
In this blog post, we’ll dive deep into ROS2 Parameters, exploring how they work, how to manipulate them via command-line tools, and how to build a mixed C++-Python ROS2 package that demonstrates their flexibility in real-world scenarios. Let’s get started!
What Are ROS2 Parameters?
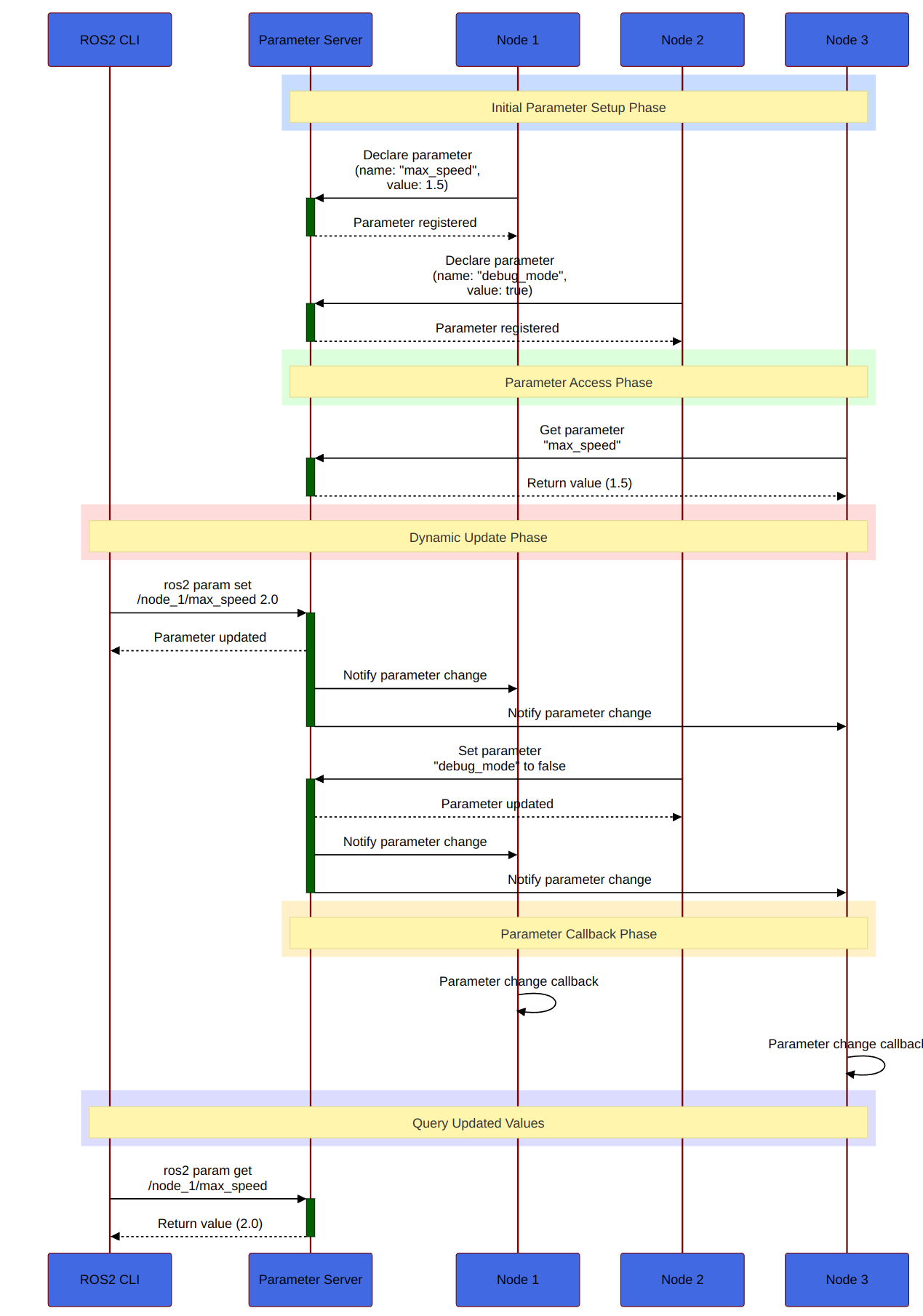
ROS2 Parameters are global or node-specific variables that can be declared, read, and updated at runtime. Think of them as the shared configuration data that your robot needs to perform its tasks correctly. These parameters can include everything from sensor update rates and thresholds to model names and debugging flags.
Defining the Types of ROS2 Parameters
In ROS2, parameters can store various data types such as integers, floats, booleans, strings, and more. You can also have arrays of these basic types. Furthermore, each parameter is accompanied by metadata (such as a descriptor) that can specify validation constraints and read/write access levels.